Chenning Yu
I am a final year Ph.D. candidate at UCSD Computer Science & Engineering Department. I am very fortunate to have Sicun Gao as my advisor. We are currently working on compositional methods for generative models and robotics.
Helping you makes me happy! I am always open to discussion and collaboration. Let me know how I can help you through this Google Form .
Email /
CV /
Google Scholar /
Github
Compositional Value-based Methods for Planning and Generative Modeling
Chenning Yu
PhD Thesis , 2025
paper |
slides |
recording
Improving Compositional Generation with Diffusion Models Using Lift Scores
Chenning Yu and
Sicun Gao
ICML , 2025
paper |
code |
blog
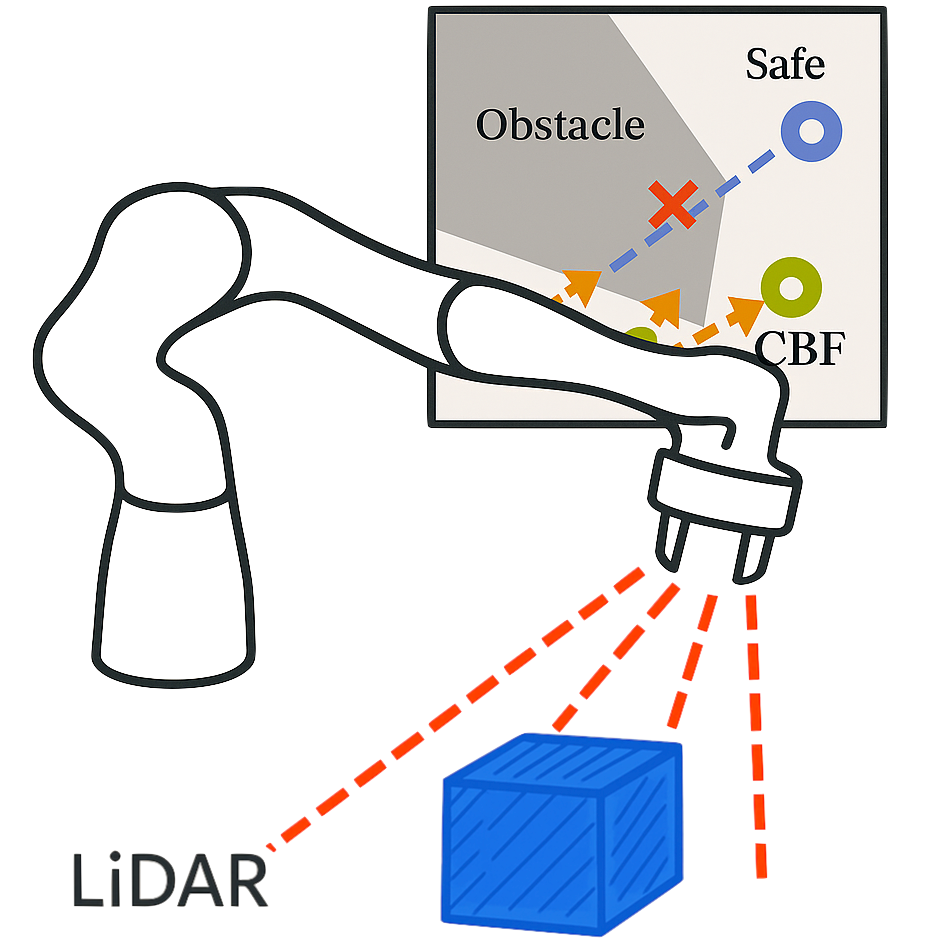
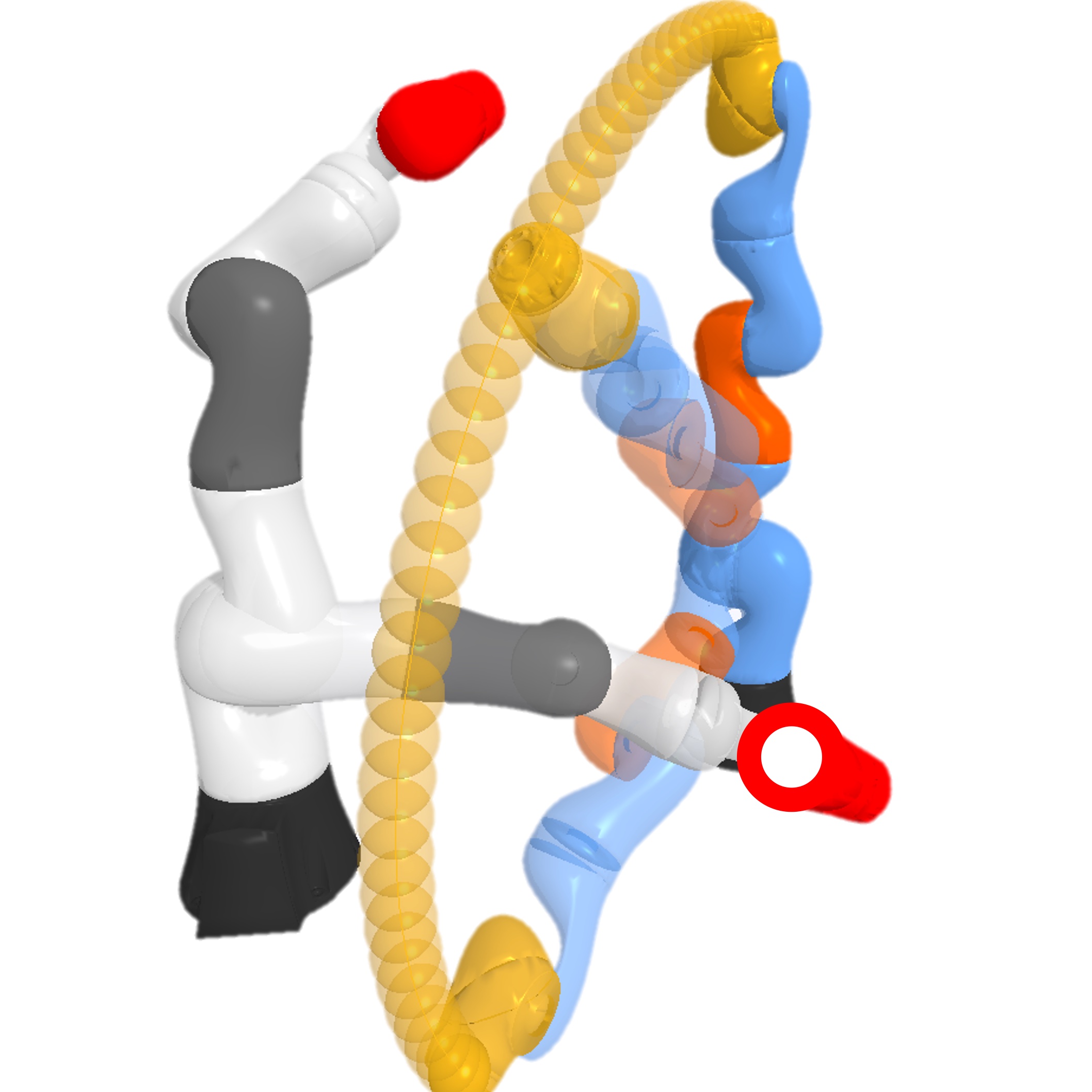
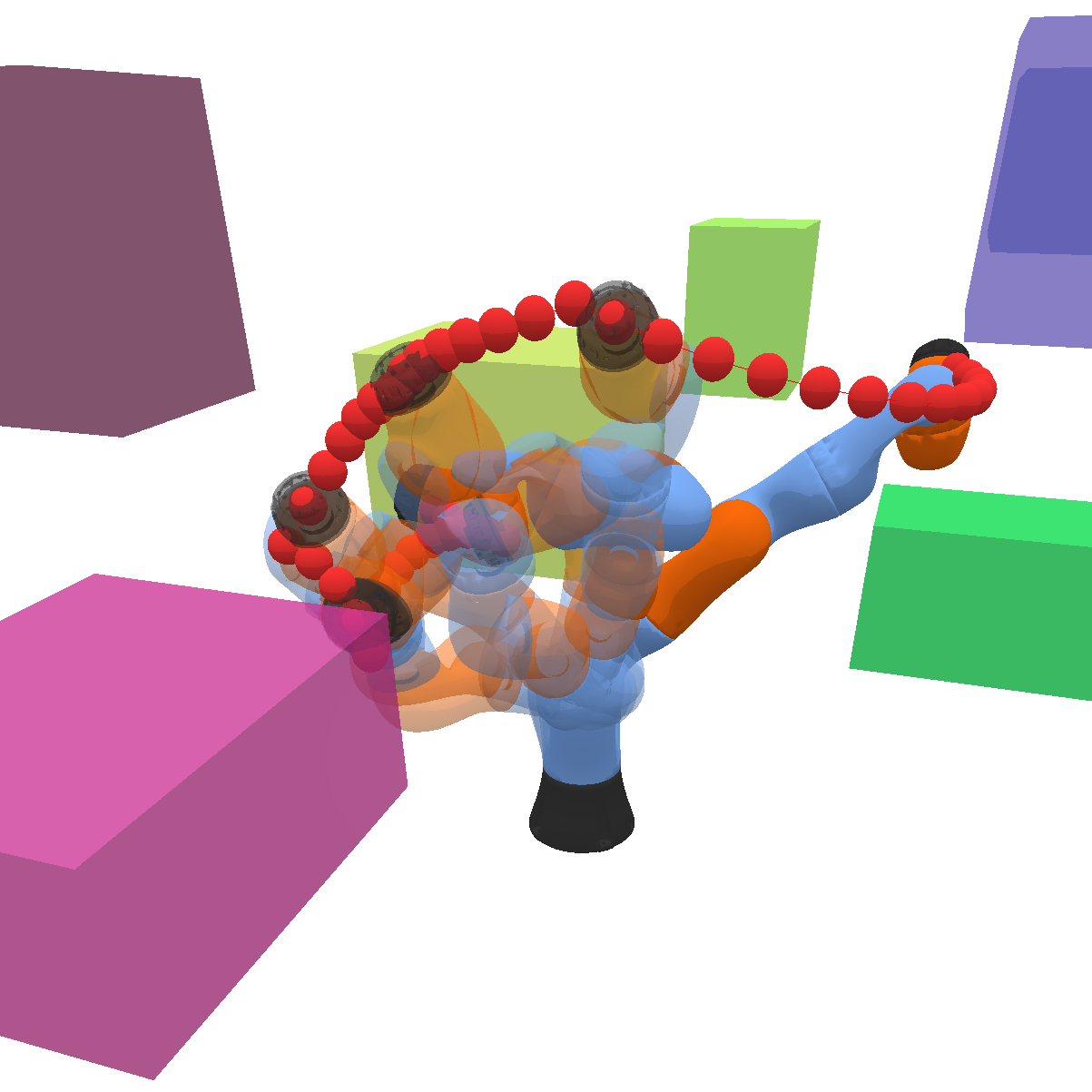
Efficient Motion Planning for Manipulators with Control Barrier Function-Inspired Neural Controller
Mingxin Yu ,
Chenning Yu ,
Mahdi Naddaf ,
Devesh Upadhyay ,
Sicun Gao , and
Chuchu Fan
ICRA , 2024
paper |
code |
website
Your browser does not support the video tag.
Iterative Reachability Estimation for Safe Reinforcement Learning
Milan Ganai , Zheng Gong , Chenning Yu , Sylvia Herbert , and Sicun Gao
NeurIPS , 2023
paper |
code |
website
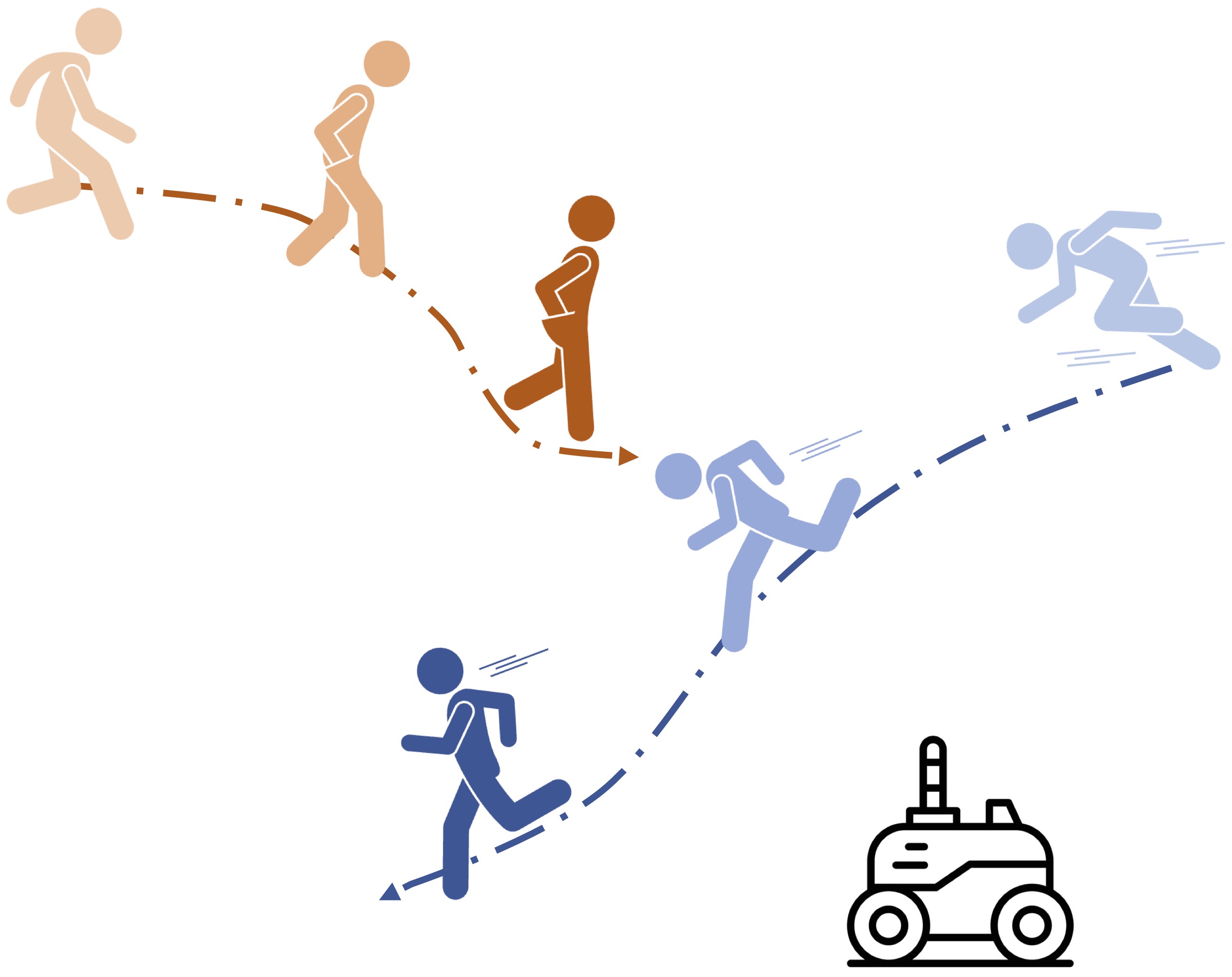
Sequential Neural Barriers for Scalable Dynamic Obstacle Avoidance
Hongzhan Yu , Chiaki Hirayama , Chenning Yu , Sylvia Herbert , and Sicun Gao
IROS , 2023 / Best Robocup Paper Award
paper |
website
Your browser does not support the video tag.
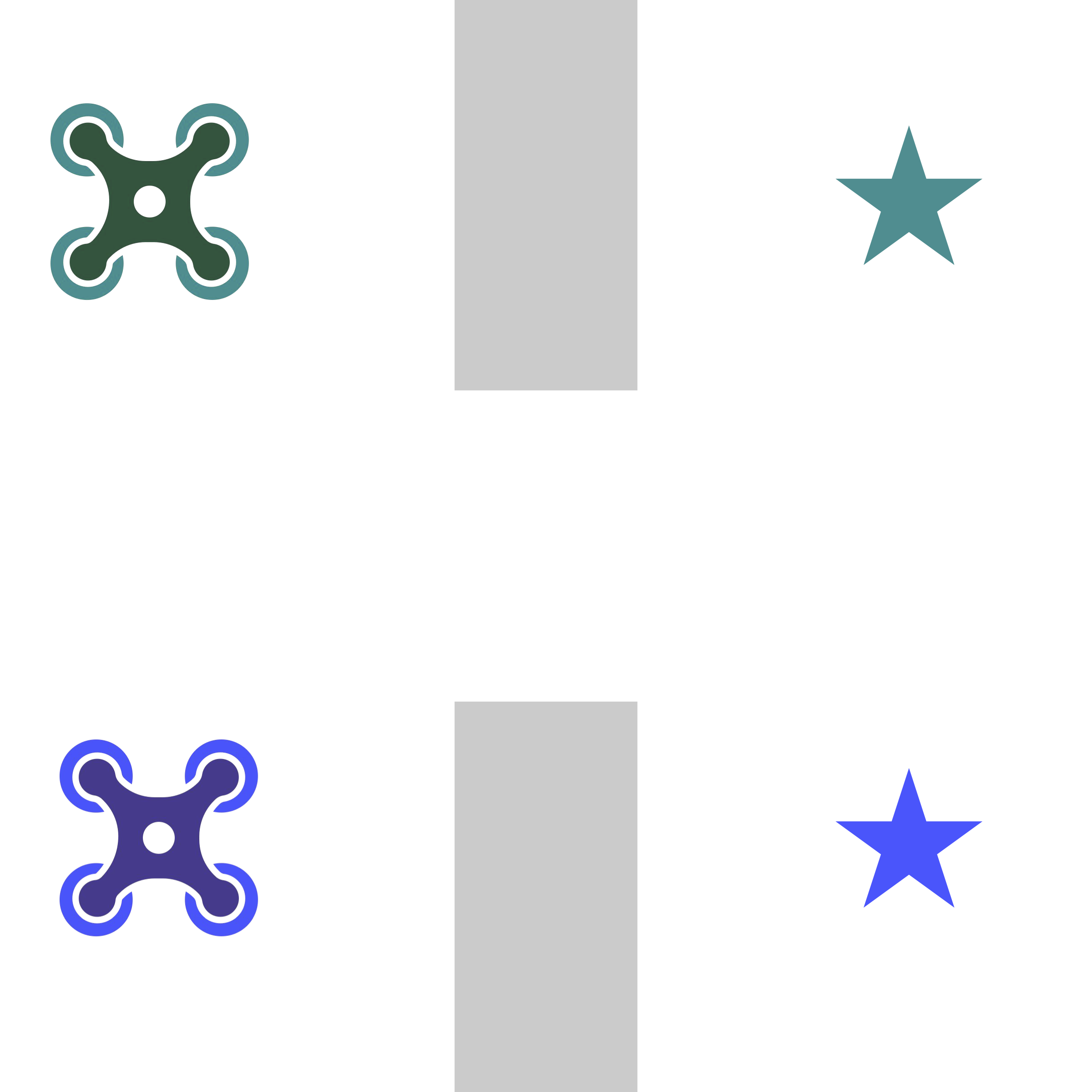
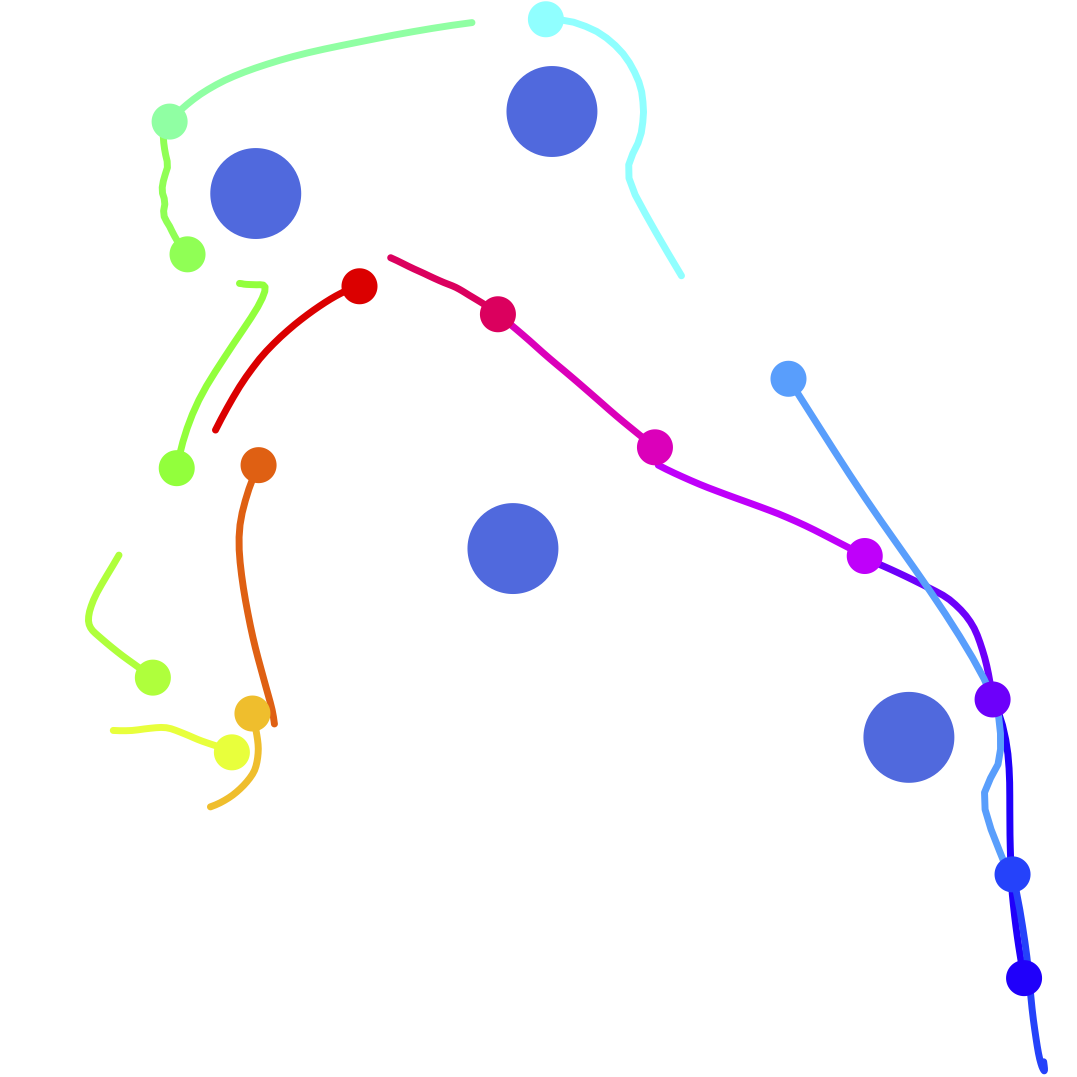
Accelerating Multi-Agent Planning Using Graph Transformers with Bounded Suboptimality
Chenning Yu* , Qingbiao Li* , Sicun Gao , and Amanda Prorok
ICRA , 2023
paper |
code |
website
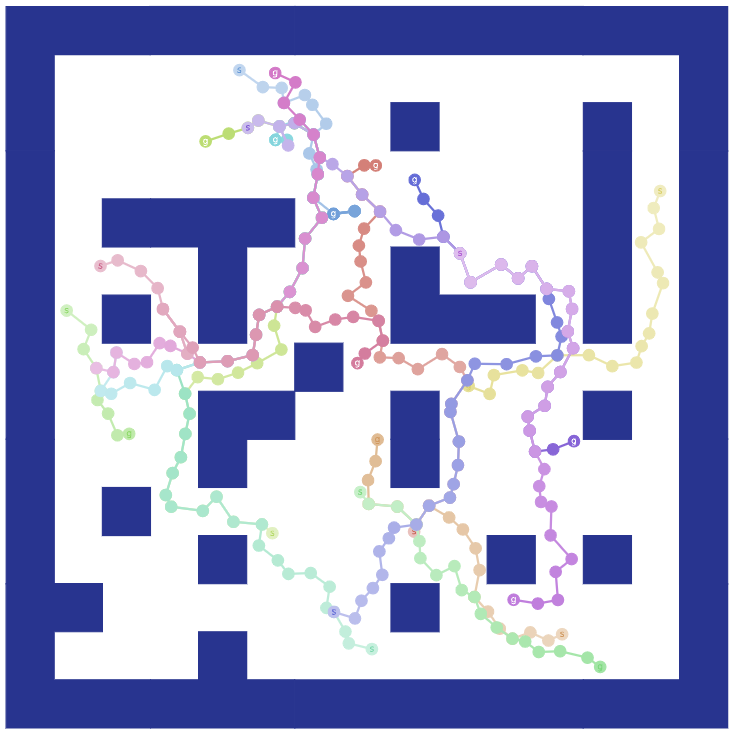
Learning-based Motion Planning in Dynamic Environments Using GNNs and Temporal Encoding
Ruipeng Zhang , Chenning Yu , Jingkai Chen , Chuchu Fan , and Sicun Gao
NeurIPS , 2022
paper |
code |
website
Your browser does not support the video tag.
Learning Control Admissibility Models with Graph Neural Networks for Multi-Agent Navigation
Chenning Yu , Hongzhan Yu , and Sicun Gao
CoRL , 2022
paper |
code |
website
Your browser does not support the video tag.
Reducing Collision Checking for Sampling-Based Motion Planning Using Graph Neural Networks
Chenning Yu and Sicun Gao
NeurIPS , 2021
paper |
code |
website